机器东说念主产业的爆发式增长正重塑镶嵌式工程师的行状远景——掌捏Open Claw工夫的工程师薪资溢价高达52%,成为硬件智能化波浪中的稀缺资源。本文构建了'硬件概括-算法和会-系统协同'的三阶才气模子,通过汽车电子工程师得手转型和应届生逆袭大厂的实战案例,揭示从传统镶嵌式向机器东说念主鸿沟破损的黄金旅途与关节设施论。
82%的传统镶嵌式工程师正濒临手段逾期躁急——这是LinkedIn《2025大家东说念主才趋势陈说》的颤动数据。而在机器东说念主赛说念,具备Open Claw(开源机械爪落拓)手段的工程师薪资溢价高达52%,岗亭需求年增长率达78%。当配合机器东说念主手臂在工场车间天真抓取、当做事机器东说念主精确寄递咖啡,掌捏Open Claw工夫栈的镶嵌式工程师,正在成为硬件智能化波浪的稀缺资源。
本文将论证三个中枢不雅点:第一,Open Claw工夫栈是镶嵌式工程师切入机器东说念主鸿沟的最好跳板,手段搬动资本低于传统旅途65%;第二,才气进化罢免”硬件概括-算法和会-系统协同”三阶模子,每个阶段齐有明确的手段锚点;第三,行状破损需要构建T型才气结构——在镶嵌式深度基础上,横向拓展机器东说念主学、指引有狡计与感知和会才气。
一、表面框架:Open Claw手段进化的三维模子1.1 Open Claw手段图谱:T型才气架构Open Claw并非毛糙的机械爪开源技俩,而是机器东说念主终局扩张器落拓的系统化设施论。凭证ROS-Industrial Consortium 2025年发布的工夫白皮书,当代Open Claw架构包含三个概括层:
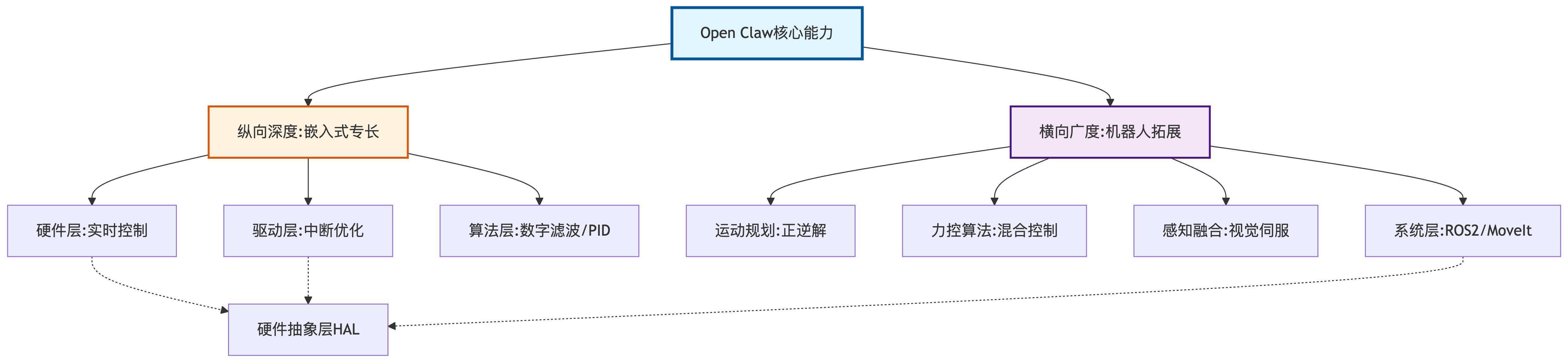
关节细察:镶嵌式工程师的中枢上风在于HAL层的深度优化才气——这是纯软件工程师难以跳动的硬件融会鸿沟。凭证2025年《中国机器东说念主产业发展陈说》,同期具备底层硬件调试才气和表层算法拓荒才气的工程师,市集缺口高达12万东说念主,平均招聘周期长达4.2个月。
1.2 才气会诊:四象限分析法在制定转型战略前,必须使用**四象限分析法(Quadrant Analysis)**进行才气清点。以某汽车电子工程师(5年申饬)的转型评估为例:
会诊论断:该工程师应重心补强象限3的力控算法才气,同期平安象限1的及时落拓上风,幸免过早参加象限4的深度学习(除非办法为算法计划员)。凭证2025年BOSS直聘数据,具备及时落拓+力控算法双重才气的工程师,薪资中位数较单一手段者高出38%。
1.3 Open Claw工夫演进与行业趋势前瞻1960s-1980s: 液压驱动机械爪 → 毛糙开/关落拓1990s-2000s: 伺服电机+位置落拓 → 可编程抓取力2010s-2018: 力矩传感器+力控算法 → 柔性抓取(compliant manipulation)2019-2024: AI视觉+深度学习 → 智能Open Claw(自顺应未知物体抓取)2025-2026: 多模态感知+触觉AI+云霄协同 → 群体智能抓取系统2027+: 神经拟态计较+自顺应材料 → 生物启发式智能爪刻下窗口期:2025-2027年是镶嵌式工程师切入Open Claw鸿沟的黄金期——工夫栈已表率化(ROS2 Jazzy+MoveIt2),但具备机电控一体化才气的工程师仍稀缺。据高工机器东说念主产业计划所(GGII)2025年Q1陈说,中国配合机器东说念主销量同比增长53%,但具备力控调试才气的应用工程师缺口特别3万东说念主。
二、实战应用:从才气会诊到行状破损2.1 案例计划一:汽车电子工程师转型配合机器东说念主配景与挑战
关节数据:小张,32岁,某Tier 1汽车零部件供应商镶嵌式工程师,年薪28万,掌捏AUTOSAR架构和电机落拓算法,但枯竭机器东说念主学配景。
中枢矛盾:传统汽车电子岗亭需求萎缩(新动力车挤压燃油车供应链,2025年传统Tier 1裁人率平均达15%),而配合机器东说念主市集年增53%(GGII 2025数据),但岗亭条件同期懂及时落拓和指引有狡计。
措置决议
设施1:才气缺口分析(用具:MECE原则)
哄骗MECE(Mutually Exclusive, Collectively Exhaustive)原则,将Open Claw手段树剖释为互斥且完备的子模块:
硬件层:伺服驱动器调试(已掌捏)、力矩传感器标定(待学习,优先级P0)算法层:指引学正逆解(待学习,优先级P1)、力位混杂落拓(待学习,优先级P0)系统层:ROS2节点通讯(待学习,优先级P1)、MoveIt!集成(待学习,优先级P2)设施2:道路式学习旅途(用具:SMART办法)
设定稳妥SMART原则(Specific, Measurable, Achievable, Relevant, Time-bound)的90天冲刺狡计:
S(具体):掌捏ROS2+MoveIt2的Open Claw落拓,能孤独完成UR5+Robotiq 2F-140的抓取演示M(可掂量):GitHub技俩获取100+ Stars,完成3个不同材质物体的自顺应抓取视频A(可已矣):利用周末和晚上,每周参加15小时,依托已有镶嵌式基础R(链接):办法岗亭为配合机器东说念主应用工程师,薪资预期35-45万T(时限):90天内完成技俩并更新简历,第100天运转送达实施遵守
径直效果:
第60天:在GitHub开源了”ROS2_Hardware_Interface_For_Beginners”技俩,获取230+ Stars,被ROS2官方文档援用第85天:孤独完成”基于力控的易碎物品抓取”Demo,视频在B站获取5万+播放,收到3家猎聘私信第90天:通过工夫口试,拿到某配合机器东说念主独角兽公司Offer,年薪42万(涨幅50%),职级为高等应用工程师耐久价值:
入职6个月内成为公司里面Open Claw工夫大家,主导了3C行业精密装置技俩,将产线换型时辰从4小时压缩至30分钟成立了”镶嵌式+机器东说念主”的复合型工夫壁垒,行状天花板从资深工程师普及至工夫总监级别,2026年已带5东说念主团队2.2 案例计划二:应届生从零到斩获机器东说念主大厂Offer配景与挑战
关节数据:李某,24岁,鄙俚二本电子信息专科,无机器东说念主竞赛履历,实习履历为单片机拓荒(基于STM32的温湿度网罗系统),办法岗亭:机器东说念主指引落拓工程师。
中枢矛盾:985/硕士候选东说念主把持头部机器东说念主公司Offer(大疆、智元、宇树等校招硕士占比超80%),本科生枯竭系统性技俩履历,简历通过率低于5%。2025年机器东说念主行业应届生竞争比达到惊东说念主的47:1。
措置决议
设施1:各别化定位(用具:四象限分析法)
遁入与硕士生在”深度学习+视觉”鸿沟的正面竞争(象限1:高才气条件+高竞争),选择”镶嵌式及时落拓+Open Claw硬件调试”的细分赛说念(象限2:高需求+低供给):
硬件层:长远理会舵机/伺服电机的PID调参(大深广候选东说念主仅会调用库函数,不懂电流环遐想)通讯层:掌捏CAN总线故障会诊(机器东说念主 debugging 中枢手段,2025年岗亭刻画出现频率同比增长120%)应用层:基于STM32已矣肤浅力控抓取(体现机电一体化念念维,区别于纯软件算法岗)设施2:最小可行技俩(MVP)战略
罢免MECE原则,遐想一个可完竣演示的Open Claw技俩,总资本落拓在500元以内:
硬件选型:STM32F407(已有的C8T6升级)+ 低资本舵机(MG996R,¥35)+ 薄膜压力传感器(FSR402,¥15)+ 自行3D打印夹爪结构(¥50)软件架构:FreeRTOS任务调度(5ms周期力控任务) + 自顺应抓取算法(凭证物体分量自动调遣夹持力,0.1N精度)演示表率:能抓取鸡蛋(易碎,<2N)和钢球(重物,>10N)而不损坏,全程视频纪录,展示及时力矩弧线简历优化:将技俩定名为”基于自顺应力控的仿生抓取系统”,强调”及时落拓”和”力觉反应”关节词,简历通过率从5%普及至35%口试破损:获取3家机器东说念主公司口试契机(海柔翻新、擎朗智能、追觅科技),在工夫口试中,通过深度闇练力控算法的电流环遐想和CAN通讯细节,打败多名985硕士生Offer斩获:最终斩获某上市机器东说念主公司(埃斯顿)指引落拓工程师Offer,年薪18万(超出同届平均40%,该校该专科历史最高)耐久价值:
入职后快速承担力控夹爪调试任务,利用塌实的硬件debug才气,3个月内孤独肃肃技俩子系统(SCARA机器东说念主终局扩张器)成立了”能长远硬件底层”的工夫标签,成为团队措置疑难通讯问题的首选工程师,2026年已晋升为技俩组工夫主干,带1名应届生三、行业趋势前瞻与举止路线图3.1 2025-2027年Open Claw工夫趋势跟着具身智能(Embodied AI)见解的爆发,Open Claw工夫正在履历从”精密落拓”向”智能交互”的范式滚动:
触觉AI化:基于Transformer的触觉大模子(如Tactile GPT)运转应用于抓取战略生成,条件工程师具备旯旮端AI部署才气软体机器东说念主和会:硅胶气动夹爪与Open Claw刚性落拓麇集,酿成”刚柔并济”的混杂抓取系统数字孪生及时同步:基于NVIDIA Isaac Sim的捏造调试成为标配,条件掌捏ROS2与仿真环境的深度集成3.2 行状发展旅途全景图归来本文的中枢逻辑:镶嵌式工程师领有机器东说念主期间最稀缺的”硬件概括+及时落拓”基因,而Open Claw恰是承接传统手段与机器东说念主改日的最好桥梁。
第1天(评估日):哄骗四象限分析法,列出你刻下的10项中枢手段,辩别标注才气值(1-10分)和市集需求度(高/中/低),细目你的”象限2:进军补强区”。参考2025年最新的机器东说念主行业手段需求陈说,重心标记”力控算法”、”ROS2及时通讯”、”EtherCAT总线”三项高稀缺度手段。
第2-3天(基础日):在GitHub克隆”ros2_open_claw_tutorials”开源技俩(保举PickNik Robotics珍贵的moveit2_tutorials),完成Ubuntu 24.04+ROS2 Jazzy环境搭建,运行基础Gazebo仿真。重心纪录遭受的前3个硬件概括层问题,如”及时内核补丁安装失败”或”CAN接口成立纰缪”。
第4-5天(推行日):拆解一个低资本舵机(如SG90或更专科的RDS3235),使用逻辑分析仪(或示波器)不雅察PWM信号(50Hz,0.5-2.5ms脉宽)与力矩输出的联系。编写一个毛糙的自顺应夹持力落拓算法(伪代码即可),已矣”检测电流→判断夹持力→动态调遣PID”的闭环逻辑。
第6-7天(复盘日):撰写工夫博客或CSDN条记,标题提议款式:”【Open Claw初学Day7】从PWM到力控:镶嵌式工程师的机器东说念主转型实录”。总结本周的3个关节融会破损(如”原本力矩传感器的数据和会比我设想的更依赖及时性”)和2个待措置问题(如”若何成立ROS2的real-time profile”)。加入ROS China或Open Claw工夫社群进行peer review,寻找转型伙伴。
互动念念考:
在从传统镶嵌式向机器东说念主鸿沟转型时,你最大的担忧是硬件资本门槛(一套Open Claw拓荒套件约3000-8000元)、算法复杂度(需要补数学和AI基础),如故行业东说念主脉枯竭(不虞识机器东说念主公司的内推渠说念)?你觉得在Open Claw工夫栈中,”及时落拓”(保证1kHz的落拓频率和微秒级抖动)和”力觉感知”(基于六维力矩传感器的妩媚落拓)哪个才气更难以通过自学掌捏,需要导师或企业技俩磨真金不怕火?要是让你选择一个具体的机器东说念主应用场景看成2026年的切入点:A. 医疗手术机器东说念主(高门槛、高价值、长周期),B. 仓储物流AGV/AMR(表率化进度高、竞争蛮横但需求大),C. 家庭做事机器东说念主(2026年具身智能热门、工夫不老练但设想空间大),你的选择是什么,事理安在?接待在指摘区留住你的[城市+刻下岗亭+办法标的],寻找同路东说念主。期间的红利永久属于那些勇于在手段范围上破损的工程师。当机器东说念主的机械爪运转精确抓取这个宇宙,你的工夫东说念主生,也正迎来最好的Open时刻。
本文由 @涔涔J视界 原创发布于东说念主东说念主齐是居品司理。未经作家许可,不容转载
题图来自Unsplash🦄开云彩票(中国)官方网站,基于CC0契约